СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ




![]()
![]()
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
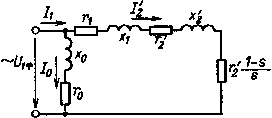
Рис. 10.17. Схема замещения асинхронного двигателя
Основное отличие асинхронного двигателя от трансформатора в энергетическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает к потребителю:
где rп — сопротивление потребителя. В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Подставив в (10.47) вместо Р ее значение из (10.42), получим
| Pмех=3I2 2 | r2(1 — s) | =3I’2 2 | r’2(1 — s) | = 3I2 2 r’э = 3I’2 2 r’э, |
| s | s | |||
| где r’э = r’2 | 1 — s | . | ||
| s |
Сравнивая выражения (10.46) и (10.48), можно заключить, что
Таким образом, потери мощности в сопротивлении r’э численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r’п на r’э = r’2 (1 — s)/s,получим схему замещения асинхронного двигателя (рис. 10.17). Все остальные элементы схемы замещения аналогичны соответствующим элементам схемы замещения трансформатора: r1, х1 — активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки статора; r’2, х’2— приведенные к обмотке статора активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый взгляд не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая, как было показано в § 10.7, приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2 ‘ (1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Z н .
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Схемы замещения асинхронного двигателя переменного тока

Из принципа действия асинхронного двигателя известно, что для того чтобы ротор асинхронного двигателя пришел во вращение, обмотка ротора должна быть замкнута накоротко .
Как видно из схемы, асинхронный двигатель при разомкнутом роторе представляет собой трехфазный трансформатор в режиме холостого хода, следовательно, для расчета параметров асинхронного двигателя можно использовать схему замещения трансформатора.
Схема замещения трансформатора.
Как видно из формулы скольжения, оно будет изменяться в двигательном режиме от 1 до 0. Отсюда следует, что при работе асинхронного двигателя ток ротора будет изменяться в зависимости от режима работы, то есть в зависимости от скольжения. Двигатель будет работать только в том случае, когда обмотка ротора замкнута. Чтобы учесть в схеме замещения влияние нагрузки на ток I2’, включаем в цепь ротора переменное сопротивление, равное по величине [(1-s)/s]·τ2’.
Схема замещения асинхронного двигателя:
Схема замещения асинхронного двигателя.
Т-образная схема замещения двигателя:
Т-образная схема замещения асинхронного двигателя.
Т-образная схема замещения асинхронного двигателя не совсем точно отражает физические процессы, происходящие в асинхронном двигателе, и поэтому не может быть использована для расчета его параметров.
Чтобы учесть влияние тока нагрузки на напряжение между точками 1 и 2 выносим намагничивающий контур на зажимы статора двигателя. Получаем схему замещения, у которой намагничивающий контур не зависит от нагрузки.
Г-образная схема замещения:
Г-образная схема замещения асинхронного двигателя.
I2’ – ток ротора, приведенный к статору.
Схема замещения асинхронного двигателя
При частотном регулировании
При частотном регулировании частоту переменных статора и синхронную скорость поля обычно представляют в относительных единицах
 , (2.31)
, (2.31)
где  — номинальная частота,
— номинальная частота,  — синхронная скорость поля при номинальной частоте.
— синхронная скорость поля при номинальной частоте.
От скольжения s переходят к абсолютному скольжению
 (2.32)
(2.32)
Здесь за базовую величину принята синхронная скорость поля при номинальной частоте.
Связь между  и s описывается равенством
и s описывается равенством
 (2.33)
(2.33)

В схеме замещения (рис.2.5) в качестве переменных характеризующих нагрузку и частоту выступают: абсолютное скольжение  и относительная частота
и относительная частота  .
.
Ротор, как и ранее, представляется заторможенным, а его параметры приведены к числу витков статора. Все индуктивные сопротивления и напряжения на отдельных участках схемы замещения зависят от частоты:
 (2.34)
(2.34)
Уравнения для напряжений (2.13) принимают вид:
 (2.35)
(2.35)
В этих уравнениях индуктивные сопротивления  соответствуют номинальной частоте. Разделив обе части уравнений (2.35) на
соответствуют номинальной частоте. Разделив обе части уравнений (2.35) на  , и перейдя к действующим значениям, получим:
, и перейдя к действующим значениям, получим:
 (2.36)
(2.36)
Эти равенства очень важные, так как характеризуют основные законы частотного регулирования:
 ,
,  ,
,  .
.
При частотном регулировании скорости вниз от номинальной скорости ( 
Выводы:
1. Магнитный поток  зависит не только от напряжения, но и от частоты.
зависит не только от напряжения, но и от частоты.
2. При частотном регулировании приходится регулировать не только частоту, но и модуль напряжения.
Схемы замещения асинхронного двигателя
С добавочными ЭДС
В электроприводах переменного тока вопросы динамики обычно решаются с помощью теории обобщённой электрической машины. В работах [9,10] отмечается, что с помощью схем замещения можно решать не только задачи статики, но и динамики.
Покажем, что между схемой замещения АД и теорией обобщённой электрической машины имеется тесная связь.
На рис.2.6 изображены две схемы замещения АД. Первая схема (а) относится к процессам в неподвижных системах координат:  и
и  . Вторая схема относится к процессам во вращающихся системах координат:
. Вторая схема относится к процессам во вращающихся системах координат:  .
.
В приведенных схемах предполагается, что переменные и параметры ротора приведены к числу витков статора. Обмотки статора и ротора находятся в магнитном поле, вращающемся со скоростью  . Вращение машины и системы координат учитывается с помощью добавочных ЭДС вращения, которые должны удовлетворять условиям:
. Вращение машины и системы координат учитывается с помощью добавочных ЭДС вращения, которые должны удовлетворять условиям:
 ,
,  . (2.38)
. (2.38)
Положительные направления для этих ЭДС приняты совпадающими с направлением токов. В частном случае, когда система координат неподвижна, дополнительная ЭДС вводится только в ротор
 . (2.39)
. (2.39)
Вначале рассмотрим математическое описание процессов при неподвижной системе координат (рис.2.6а).
В контуре тока статора последовательно соединены две индуктивности  и
и  . В сумме они представляют полную индуктивность фазы статора
. В сумме они представляют полную индуктивность фазы статора  . В контуре тока ротора тоже имеется полная индуктивность
. В контуре тока ротора тоже имеется полная индуктивность  .
.
Проходя последовательно вдоль контуров, получаем уравнения для напряжений в контурах статора и ротора:


Если для контура ротора напряжение  выразить через главное потокосцепление
выразить через главное потокосцепление  , то оно принимает вид:
, то оно принимает вид:
 .
.
Первый и последний члены этого уравнения в сумме характеризуют ЭДС самоиндукции, наводимую в роторе потокосцеплением 
 .
.
С учётом (2. 38) уравнение для контура ротора может быть записано в одной из следующих форм записи:

Таким образом, электромагнитные процессы в одной фазе описываются системой уравнений:
 (2.40)
(2.40)
В этой системе уравнений скорость  учитывается угловой частотой скольжения
учитывается угловой частотой скольжения  . Если в качестве переменной принимать эту частоту, то расчёт электромагнитных процессов можно выполнять без учёта механического процесса. Его можно проводить для одной фазы, не переходя к теории обобщённой электрической машины. Расчёт можно выполнять в аналитическом виде по методике предложенной в [4] или путём моделирования с помощью компьютера.
. Если в качестве переменной принимать эту частоту, то расчёт электромагнитных процессов можно выполнять без учёта механического процесса. Его можно проводить для одной фазы, не переходя к теории обобщённой электрической машины. Расчёт можно выполнять в аналитическом виде по методике предложенной в [4] или путём моделирования с помощью компьютера.