Электрическая схема мачтового подъёмника
Принципиальная электрическая схема грузоподъёмного механизма включает в себя информацию о составе электрооборудования подъёмника, назначении его элементов и взаимосвязи между ними в процессе работы. Как правило, при выполнении различных технических работ, связанных с монтажом, обслуживанием или эксплуатацией подъёмного оборудования, используется не принципиальная, а составленная на её основании, монтажная электрическая схема. В монтажной схеме дополнительно указывается тип кабеля (сечение и количество жил), его длина и способ прокладки, компоновка элементов, модели электромеханических устройств и т.п.
При составлении электрических схем, для обозначения элементов электрооборудования и связей между ними используются соответствующие графические обозначения, при этом все элементы, отражённые на схеме, имеют следующие буквенно-позиционные обозначения:
К- пускатель, реле или контактор (КМ — магнитный пускатель, КА — реле силы тока, КК- тепловое реле, КV — реле напряжения, КТ — реле времени); М — электрический двигатель; Р — контрольно-измерительный прибор (РV — вольтметр, РА — амперметр, PW — ваттметр); Q — разъединительные выключатели силовых цепей (QF — автоматический выключатель); R — резистор (RP — потенциометр); S — устройства коммутации в цепи (SA — переключатель, SB — кнопочный выключатель; SF — не силовой автомат; SQ — концевой выключатель, SR — выключатель, срабатывающий в зависимости от скорости вращения); Т — автотрансформатор, трансформатор (ТА — трансформатор тока, ТV — трансформатор напряжения); V — полупроводники и электровакуумные приборы (VT — транзистор, УД — диод, VS — тиристор); Х — соединения (ХА — скользящий контакт, токосъёмник, XS — гнездо, ХР — штырь); Y — механические электромагнитные устройства (YB — электромагнитный тормоз, YA — электромагнит).

Электрические цепи, входящие в схему мачтового подъёмника, в зависимости от назначения делятся на силовые, вспомогательные и цепи систем управления.
Силовые цепи — это электрическая обвязка рубильников; предохранителей; катушек максимального тока; главных контактов электромагнитных пускателей, контакторов и автоматов; статоров и роторов электродвигателей; катушек электромагнитов.
Вспомогательные цепи обеспечивают работу систем обогрева, освещения и звуковой сигнализации, они включают в себя соответствующие устройства и элементы управления (кнопки, выключатели и т.п.)
Цепи систем управления (включая цепи электрической и электромеханической защиты) состоят из катушек электромагнитных пускателей, контакторов и реле; кнопок управления движением грузонесущего органа подъёмного механизма; блок-контактов контакторов и электромагнитных пускателей; концевых выключателей, реле контроля фаз и т.п.
Электрооборудование мачтового подъёмника рассчитано на питание от внешней трёхфазной электросети переменного тока с напряжением 380/220 В, частотой 50 Гц и глухозаземлённой нейтралью. При запитке от сети, имеющей межфазное напряжение 380 В, подключение обмоток двигателя выполняется звездой, а цепи управления, тормозные электромагниты и вспомогательные цепи подключаются на 220 В между нулевым и фазовым проводами. В случае питания от сети с межфазовым напряжением 220 В, обмотки электродвигателя соединяют треугольником, и подключение вспомогательных цепей, управления и тормоза производится на межфазовое напряжение 220 В. В системе электрооборудования подъёмника предусмотрена защита электродвигателя от короткого замыкания и перегрузки, при помощи предохранительного автоматического выключателя.
В качестве примера рассмотрим электрическую схему грузового мачтового подъёмника ПМГ (Рис. 1.) Подключение к сети осуществляется трёхполюсным автоматическим выключателем QX, имеющим комбинированный расцепитель с катушкой, управляемой с кнопочного поста самовозвратной кнопкой (S2). Кнопочный пост оборудован электрическим замком (S1), соответственно для включения автоматического выключателя (Q) необходимо вставить ключ. Включение реверсивного двигателя механизма подъёма осуществляется реверсивным электромагнитным пускателем К, при помощи замыкания пусковых контактов самовозвратных кнопок «Вверх» и «Вниз» (S3, 4) кнопочного поста ПКТ-40.
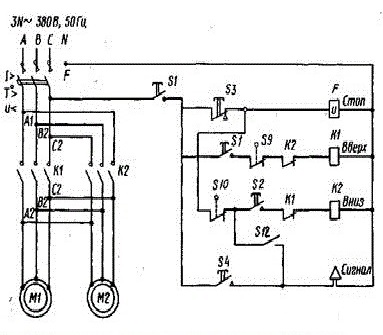
В цепи предусмотрены соответствующие концевые выключатели (S6 и S7), размыкающие цепь в крайних положениях грузонесущего органа подъёмного механизма. На кнопочном посту (ПКТ- 40) также располагается сигнальная кнопка (S5) для включения звукового сигнала.
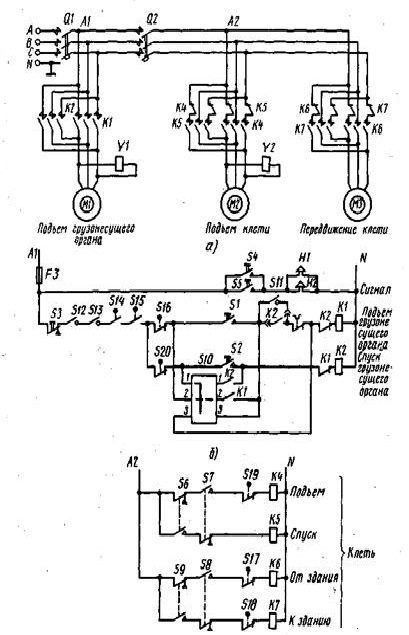
На некоторых моделях электрических строительных подъёмников мачтового типа (рис. 2), предусмотрено подключение на этажах дополнительных кнопок в цепи управления и сигнализации. В этом случае, принцип работы электрооборудования заключается в следующем: включение двигателя привода подъёмного механизма (М1) происходит при помощи электромагнитных пускателей (К1 и К2), которые приводятся в действие кнопками «Вверх» или «Вниз» (S1, S2); запуск двигателей механизмов перемещения (М2 и М3) внутри здания производится пускателями (К4, 5, 6, 7) при помощи соответствующих кнопок (S6, 7, 8, 9) на этажных пультах управления; блокировку грузонесущего органа в конечных точках перемещения осуществляют концевые выключатели (S14, 15, 16, 17, 18, 19), включённые в цепи управления соответствующих двигателей (М1, М2, М3). Для выбора монтажного или рабочего режима в электросистеме подъёмника предусмотрен универсальный переключатель. В монтажном режиме перемещение грузонесущего органа по путевой структуре происходит при непрерывном нажатии кнопки «Вверх» или «Вниз». В рабочем режиме эксплуатации включается система адресования, в этом случае, пуск двигателя производится коротким нажатием соответствующей кнопки, а остановка — кнопкой S3.
Схемы автоматизированного электропривода подъемно-транспортных машин
Подъемно-транспортные машины: краны, лифты, конвейеры, канатные дороги. Электрические схемы подъемно-транспортных машин. Для увеличения нажмите на картинку.

Рис. 1. Схема крановой защитной панели переменного тока
Рис. 2. Панель типа ПМС. Управление крановым электромагнитом
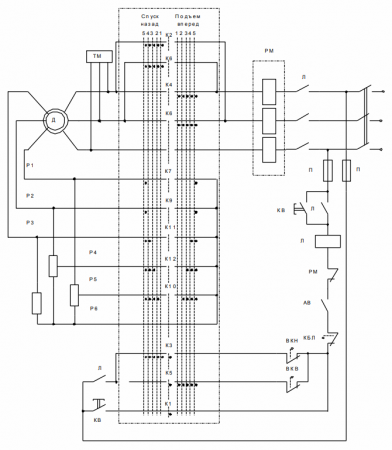
Рис. 3. Схема управления крановым асинхронным электроприводом с помощью силового контроллера
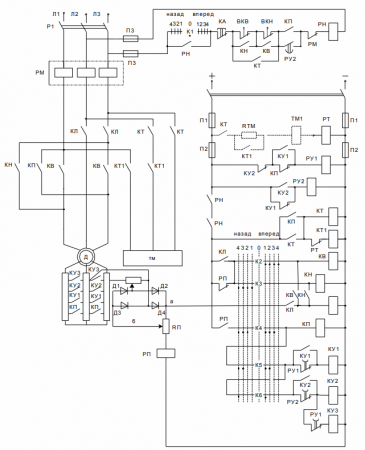
Рис. 4. Схема кранового магнитного контроллера типа К
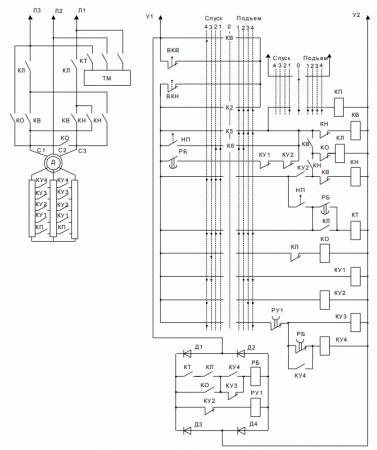
Рис. 5. Схема кранового магнитного контроллера типа ТСА
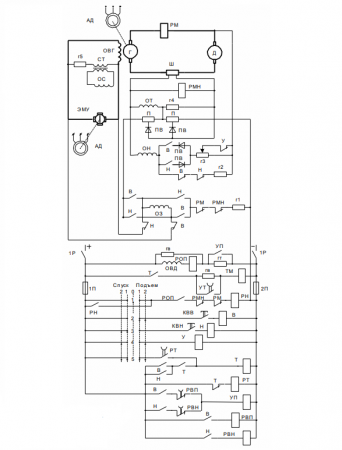
Рис. 6. Электропривод механизма подъема крана с электромашинным управлением
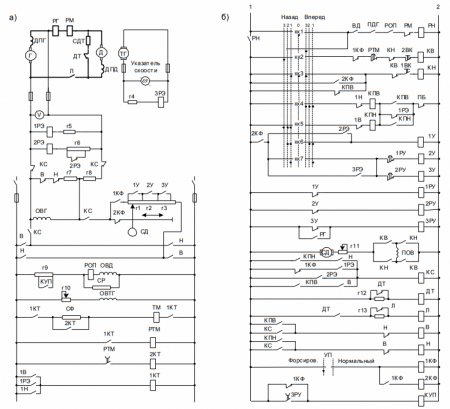
Рис.7. Электропривод подъемного крана по системе генератор-двигатель
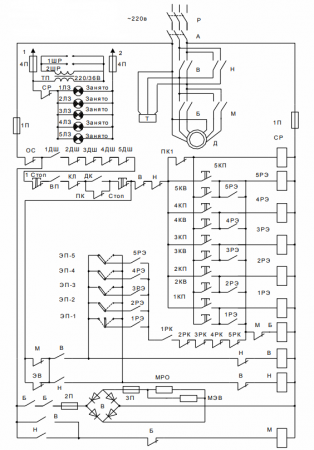
Рис. 8. Схема управления пассажирским лифтом с двухскоростным асинхронным двигателем
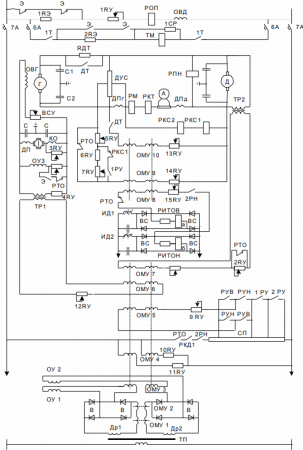
Рис. 9. Упрощенная схема привода скоростного лифта с управлением от ЭМУ и ПМУ
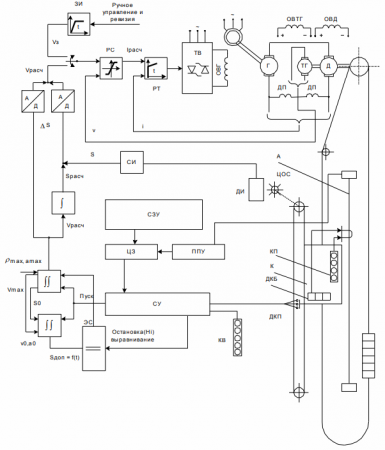
Рис. 10. Схема скоростного лифта башни Московского телецентра. Пояснения: Г – генератор; Д – двигатель; РС – регулятор скорости; РТ – регулятор тока; ЗИ – задатчик интенсивности; СИ – счетчик импульсов; Д/А – дискретно-аналоговые преобразователи; Sрасч – расчетный путь; S – реальный путь; dS – ошибка по пути; ЭС – электронное сравнивающее устройство; Vрасч – расчетная скорость; КВ – кнопки вызова; КП – кнопки приказа; СУ – система управления; А – антенна; ДИ – датчик импульсов; ЦОС – центробежный ограничитель скорости; ДКБ – датчики контроля безопасности; ППУ – приемо-передающее устройство; ДКП – датчики контроля положения; ЦЗ – цепи защиты.
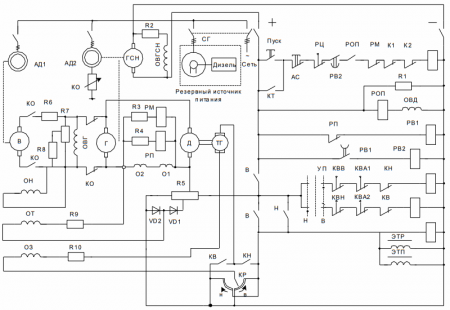
Рис.11. Схема электропривода канатной дороги
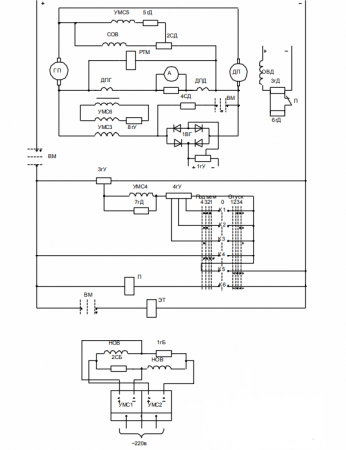
Рис. 12. Принципиальная схема управления электроприводом механизма подъема экскаватора средней мощности с магнитными усилителями
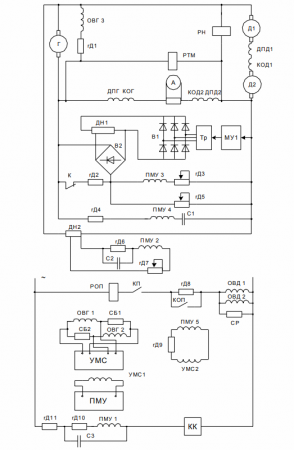
Рис. 13. Принципиальная схема управления электроприводом мощного экскаватора с использованием магнитных усилителей
Рис. 14. Схема управления электроприводом подъема экскаватора типа ЭКГ-4,6Б
Электрооборудование подъемно-транспортных установок,
конвейеры,электропривод,электросхемы
Условия эксплуатации:
— продолжительный режим работы без пауз за время включения,
— редкие пуски и неизменное направление вращения,
— преодоление статических моментов при трогании под нагрузкой (после внезапной аварийной остановки),
— влияние окружающей среды (перепад температур, агрессивная среда, запыленность и т. п.).
Требования к электроприводу:
— повышенный пусковой момент(Mп/Mном = 1,6. 1,8);
— плавный пуск и торможение (для предотвращения пробуксовывания ленты или раскачивания груза у ленточных и подвесных);
— небольшое регулирование скорости в диапазоне 1:2 (для изменения темпа работы у поточных линий);
— согласованное вращение электроприводов (для нескольких конвейеров).
Электродвигатели.
• Асинхронные электродвигатели ( АД) с КЗ-ротором и повышенным пусковым моментом (Мп), односкоростные или многоскоростные (с переключением числа пар полюсов).
Примечание — Для регулирования скорости однодвигательного привода конвейера применяются дополнительные вариаторы механические или рагулируемые электрические и гидравлические муфты.
• АД с фазным ротором:
— на конвейерах, требующих повышенного пускового момента;
— при многодвигательном приводе конвейеров (для выравнивания нагрузок отдельных двигателей);
— при обеспечении согласованного движения конвейеров.
Многодвигательный привод.
Применяется при большой протяженности конвейеров.
Использование нескольких приводных станций позволяет избежать больших напряжений в механизмах, перегрузки участков, уменьшить габариты тягового органа и величину тяговых усилий.
При этом тяговый орган каждой приводной станции передает усилие, пропорционаяьное статическому сопротивлению только одного участка, а не всего конвейера.
Выбор места установки приводных станций определяется в соответствии с диаграммой изменения усилий натяжения.
Оптимальное количество приводных станций определяется техникоэко-номическими расчетами.
Приводные АД с КЗ-ротором должны иметь одинаковые параметры, у АД с фазным ротором характеристики в соответствие можно привести введением дополнительных сопротивлений в цепь их роторов.
Электропривод синхронного вращения.
Есть механизмы, привод которых состоит из одинаковых двигателей (два и более), требующих вращения с равными скоростями.
Примерами могут быть механизмы башенных кранов, створов разводных мостов, ворот шлюзов, конвейеров, где требуется согласованное вращение электродвигателей, а соединение их механическим валом невозможно.
В этом случае применяется электрическая связь между роторами асинхронных (АД) или синхронных (СД) двигателей, называемая электрическим валом.
Достичь этого можно, применяя специальные схемы, три из которых рассматриваются.
Схема «электрического вала» с вспомогательным АД представлена на рис. 3.3-4.



Схема «электрического вала» с резисторами представлена на рис. 3.3-5



Схема «электрического вала» двойного питания представлена на рис. 3.3-6.



Принципиальная электрическая схема управления ЭП двух совместно работающих конвейеров (рис. 3.3-7) предназначена для управления, защиты и сигнализации электроприводов двух ленточных конвейеров.



Принципиальная электрическая схема управления ЭП двух согласованно движущихся конвейеров (рис. 3.3-8) предназначена для управления, защиты и согласования двух электроприводов конвейеров.
Электропривод и электрооборудование подъемных установок
Режим работы электродвигателя подъемной машины — повторно-кратковременный, с меняющимися вращающим моментом и скоростью вращения, с частыми пусками, остановками и реверсированием.
Для подъемных машин применяют электропривод переменного тока с трехфазными асинхронными двигателями с фазным ротором, электропривод постоянного тока по системе генератор—двигатель (Г—Д) и тиристорный преобразователь—двигатель (ТП—Д). Наибольшее распространение имеет электропривод переменного тока в силу ряда преимуществ по сравнению с приводом постоянного тока (простота конструкции двигателя, меньшее количество электрических машин, относительно высокий к. п. д., возможность размещения на меньшей площади и т. д.).
Привод постоянного тока применяется для подъемных машин с двигателями большой мощности (свыше 1000 кВт) или при больших (свыше 10 м/с) скоростях подъема (безредуктор-ный привод).
Для управления двигателем подъемной машины помимо обычной аппаратуры управления (магнитных контакторов), реле управления и защиты, контроллеров, командоконтроллеров и т. п. применяют воздушные реверсоры, ограничители скорости, реостаты и другую специальную аппаратуру управления, контроля и защиты.
Станции и пульты управления выпускаются заводами в смонтированном виде, поэтому на месте монтажа их только устанавливают и присоединяют к соответствующим зажимам жилы подходящих и отходящих кабелей.
Управление подъемными машинами может быть ручное, полуавтоматическое, автоматическое и дистанционное.
При ручном управлении заданная диаграмма скорости выполняется полностью машинистом с помощью контроллера, производящего переключения в силовых цепях двигателя. При полуавтоматическом управлении машинист оттормаживает машину и при помощи аппарата управления дает импульс на включение подъемного двигателя. Заданный режим пуска выполняется автоматически специальной релейно-контакторной аппаратурой.
При автоматическом управлении выполнение заданного режима работы обеспечивается системой автоматического управления. В некоторых случаях применяется дистанционное управление подъемной машиной с приемной площадки или из клети (при спуске и подъеме людей).

Наиболее важной частью системы автоматического управления является система автоматического регулирования скорости движения подъемной машиной в соответствии с заданной диаграммой скорости, рабочий цикл подъема состоит из трех основных периодов: разгона машины, движения с равномерной скоростью и замедления машины.
В период разгона не требуется большой точности в отношении величины пройденного пути подъемным сосудом и времени разгона. Поэтому период разгона легко автоматизируется с помощью обычной релейно-контакторной системы в функции времени с дополнительной корректировкой по току.
В период равномерного хода машины регулирование не требуется, так как асинхронный двигатель работает в этот период на естественной характеристике, обладающей достаточной жесткостью, и отклонение действительной скорости от заданной практически незначительно при изменении нагрузки на валу двигателя в широких пределах.
В период же замедления машины необходимо выдерживать замедление в допустимых пределах (особенно для клетевых подъемов) и независимо от величины поднимаемого груза обеспечить остановку подъемного сосуда у приемной площадки с достаточной точностью (для скиповых подъемов ±100 мм, для клетевых— ±25 мм).
Поэтому для точного выполнения диаграммы скорости в период замедления применяются специальные системы автоматического регулирования, за которыми для подъемных установок закрепилось название — регуляторы хода. В отличие от ограничителя скорости, который при недопустимом отклонении действительной скорости от заданной отключает машину и включает аварийный тормоз, регулятор хода контролирует действительную скорость подъема, сравнивает ее с заданной и автоматически регулирует скорость, не останавливая машины.
В настоящее время наибольшее распространение получили электрические регуляторы хода, воздействующие на электрические средства динамического торможения подъемного двигателя.
На рис. 20.2 приведена принципиальная схема электрического регулятора хода.
В регуляторе хода элементом, контролирующим действительную скорость, является тахогенератор ТГ, приводимый во вращение от вала подъемного двигателя ПД. Элементом, контролирующим заданную скорость в зависимости от пройденного сосудом пути, является потенциометр PC. Положение движка / потенциометра PC определяется профилем кулака 2, установленного на диске 3 указателя глубины. Напряжения, снимаемые с тахогенератора ТГ и потенциометра PC, соответственно подаются на обмотки ОУ1 и ОУП электромашинного усилителя ЭМУ. Фактическая и заданная скорости сравниваются между собой в виде магнитных потоков обмоток управления ОУ1 и ОУП.
Магнитные потоки, создаваемые обмотками управления, направлены навстречу друг другу. При равенстве фактической и заданной скоростей результирующий магнитный поток обмоток равен нулю и, следовательно, напряжение и ток на выходе ЭМУ также равны нулю.
Если фактическая скорость будет выше заданной, то на выходе ЭМУ появится напряжение и по обмотке возбуждения генератора динамического торможения ОВГДТ потечет ток.
В результате в обмотке статора подъемного двигателя будет протекать постоянный ток, пропорциональный отклонению фактической скорости от заданной, и создается тормозной момент, снижающий скорость движения подъемной машины и уменьшающий тем самым величину отклонения скорости.
Для исключения возможности торможения машины в случае, когда фактическая скорость оказывается меньше заданной, в цепи обмотки возбуждения генератора динамического торможения предусматривается вентиль ВС, пропускающий ток только в направлении, соответствующем превышению фактической скорости над заданной.