Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию.

| Главная | Цены | Оплата | Примеры решений | Отзывы | Ccылки | Теория | Книги | Сотрудничество | Форум |
| Теория / Электрические микромашины / Лекция 16. Исполнительные двигатели постоянного тока |
2. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик. Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление. § 2.1 Якорное управление исполнительным двигателем
Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении Схема включения двигателя с якорным управлением показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов, напряжение управления — на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв. Для двигателей с постоянными магнитами a = Uу/Uу.ном. Регулирование частоты вращения осуществляется изменением напряжения управления. При отсутствии насыщения Фв= kфUв, а поскольку Uв = const, магнитный поток возбуждения также остается постоянным, т.е. Фв = const.
Вращающий момент двигателя
Выразим момент в относительных единицах, приняв за базовый момент пусковой момент, развиваемый двигателем при n = 0 и a = 1
Тогда относительное значение момента m = M/Mб Частота вращения при холостом ходе (m = 0 и a = 1) Откуда находим cеkф= 1/nо. Подставляя это значение в (2.1), получим
где n = n/nо— относительная частота вращения двигателя. Уравнение (2.3) есть уравнение механической характеристики исполнительного двигателя при якорном управлении. Решив его относительно n, получим уравнение регулировочной характеристики Механическая мощность в относительных единицах рмх = mn = n(a — n). Угловую скорость, при которой наступает максимум мощности, найдем известным приемом (dpмх/dn = 0), откуда nм= a/2, а максимальное значение механической мощности будет
Приняв за базовую единицу мощность управления при коротком замыкании Ру.к (n = О, a = 1)
На рис. 2.2,а представлены механические, на рис. 2.2,б — регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления. Механические характеристикилинейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала.
Рис.2.2. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при якорном управлении
Рис. 2.3. Зависимость механической мощности от скорости вращения при якорном управлении Регулировочные характеристикилинейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления. Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока. В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей. Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же — она небольшая по величине, что также характерно для машин постоянного тока. Максимум механической мощности в сильной степени зависит от коэффициента сигнала и даже при a = 1 не превышает 1/4 базовой мощности. § 2.3. Полюсное управление исполнительным двигателем
Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения — на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для его ограничения включают дополнительное сопротивление Rд. Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря
Принимая за базовый момент пусковой (n = 0, a =1))
получим относительное значение момента
Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх= mn = an — a 2 n 2 . Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет
На рис. 2.5,а представлены механические, на рис. 2.5,б — регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.
Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении Проанализируем эти графики. Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя. Регулировочные характеристикинелинейные, а при m 0,5. Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа. Мощность возбужденияс увеличением частоты вращения уменьшается и тем быстрее, чем больше a. Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления. Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения. Исполнительные двигатели и тахогенераторы постоянного токаИсполнительные двигатели постоянного тока
Исполнительные двигатели обычно работают в условиях частых пусков, остановок и реверсов. Они отличаются значительным начальным пусковым моментом и быстродействием. Зависимости вращающего момента и скорости якоря от напряжения управления у них в большинстве случаев близки к линейным.
Обычно используют якорное управление. Изменение полярности напряжения управления вызывает противоположное направление вращения якоря. Исполнительные двигатели постоянного тока изготовляют номинальной мощности от долей ватта до 600 Вт нормальной и специальной конструкций.
К двигателям специальной конструкции относятся магнитоэлектрические машины с возбуждением основного магнитного поля с помощью постоянных магнитов, а также малоинерционные машины, отличающиеся конструкцией якоря. К последним относятся: двигатели с полым немагнитным якорем — полым тонкостенным цилиндром из пластмассы с запрессованной обмоткой из медного провода с внутренним неподвижным ферромагнитным магнитопроводом, укрепленным на подшипниковом щите, и менее долговечные двигатели с дисковым якорем — тонким немагнитным диском из керамики, текстолита, стекла, а иногда из алюминия с печатной обмоткой, представляющей совокупность радиально расположенных по обе стороны диска проводников из медной фольги, по которой скользят серебряно-графитные щетки. Названные конструкции отличаются малым моментом инерции якоря, что обеспечивает высокое быстродействие исполнительного двигателя.
Масса исполнительных двигателей постоянного тока в 2 — 4 раза меньше, чем масса одинаковых по номинальной мощности исполнительных асинхронных двигателей, а к. п. д. их при номинальной мощности 5. 10 Вт составляет около 0,3 и достигает значения 0,65 и несколько выше для двигателей номинальной мощностью 200 — 300 Вт.
Тахогенераторы постоянного тока
Тахогенераторы бывают магнитоэлектрические с возбуждением основного магнитного поля с помощью постоянных магнитов и электродинамические с электромагнитным возбуждением, обусловленным М. д. с. обмотки возбуждения, питаемой от независимого источника электрической энергии постоянного напряжения. Выходное напряжение тахогенератора в режиме холостого хода изменяется линейно в зависимости от скорости якоря, а при нагрузке эта линейность несколько нарушается, причем тем больше, чем меньшим сопротивлением обладает измерительный прибор, присоединенный к зажимам якоря. Все же для каждого тахогенератора существует относительно небольшой диапазон измеряемых скоростей, в пределах которого при определенном достаточно большом сопротивлении измерительного прибора и неизменных условиях цепи возбуждения выходную характеристику можно считать практически линейной.
Схема включения тахогенератора постоянного тока независимого возбуждения
Неточность установки щеток по геометрической нейтрали коллектора тахогенсратора приводит к асимметрии выходного напряжения, т. е. к генерированию двух различных напряжений в обмотке якоря при противоположных направлениях его вращения с одинаковой скоростью. При правильном расположении щеток асимметрия напряжений находится в пределах от 0,3 до 1% номинального напряжения тахогенератора. ➤ Adblockdetector |





 (2.1)
(2.1) (2.2)
(2.2)
 (2.4)
(2.4)
 Мощность управления
Мощность управления
 получим мощность управления в относительных единицах
получим мощность управления в относительных единицах







 С учетом (2.2) уравнение механической характеристики примет вид
С учетом (2.2) уравнение механической характеристики примет вид





 Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности.
Исполнительные двигатели постоянного тока — маломощные машины, используемые в автоматике и телемеханике, в системах автоматического управления, регулирования и- контроля автоматизированных установок, где они преобразуют электрический сигнал измерительного органа — напряжение управления — в угловое перемещение вала для воздействия на управляющий, регулирующий или контролирующий аппарат. В тех случаях, когда поступающий сигнал недостаточен для приведения в действие исполнительного двигателя, применяют магнитный или полупроводниковый усилитель мощности. В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным .
В зависимости от системы питания цепей двигателя различают исполнительные двигатели с якорным управлением и с полюсным управлением. При якорном управлении обмоткой управления является обмотка якоря, в связи с чем напряжение управления подводят к ее зажимам, а неизменный ток возбуждения обеспечивает независимый источник электрической энергии постоянного напряжения. В случае полюсного управления обмоткой управления служит обмотка возбуждения главных полюсов и напряжение управления подводят к ее зажимам, а напряжение на зажимах якоря, задаваемое независимым источником электрической энергии постоянного напряжения, сохраняется неизменным . Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.
Двигатели нормальной конструкции аналогичны машинам постоянного тока общего применения, но отличаются от них тем, что станина с главными полюсами так же, как и якорь, собрана из тонких изолированных друг от друга листов электротехнической стали, что способствует улучшению свойств этих машин в переходных режимах. Кроме того, добавочные полюсы в этих машинах отсутствуют, так как реакция якоря невелика и процессы коммутации вполне удовлетворительны. Поскольку скорость якоря небольшая, вентилятор на валу таких двигателей не предусмотрен.

 Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.
Тахогенераторы постоянного тока — машины небольшой мощности, предназначенные для преобразования механической величины в электрический сигнал — выходное напряжение. В частности, их используют для контроля и измерения скорости вала исполнительного устройства, с которым соединен вал тахогенератора, зажимы якоря которого соединены с измерительным прибором. Помимо этого, тахогенераторы применяют в электромеханических счетно-решающих устройствах для выполнения вычислительных операций, а также в устройствах автоматической отработки генерируемых ускоряющих и успокаивающих сигналов.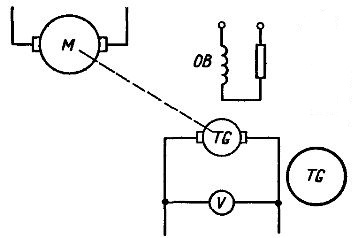
 Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.
Существенный недостаток тахогенераторов постоянного тока — пульсация выходного напряжения из-за незначительного периодического изменения магнитного потока вследствие неравномерности воздушного зазора и неравенства проводимостей якоря в различных радиальных направлениях, в том числе обусловленных зубчатой конструкцией его магнитопровода, а также из-за вибрации щеток, неровностей и эллиптичности коллектора и коммутационных процессов — в значительной мере устранен в тахогенераторе с полым якорем, который устроен так же, как и малоинерционный исполнительный двигатель постоянного тока с аналогичным якорем.