Характеристики двигателей последовательного возбуждения
В двигателе последовательного возбуждения, который иногда называют сериесным, обмотка возбуждения включена последовательно с обмоткой якоря (рис. 1). Для такого двигателя справедливо равенство Iв=Ia=I, следовательно, его магнитный поток Ф зависит от нагрузки Ф=f(Ia). В этом главная особенность двигателя последовательного возбуждения и она определяет его свойства.
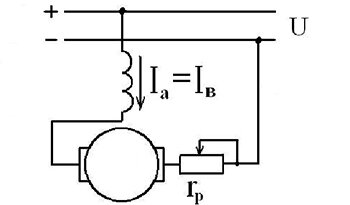
Рис. 1 — Схема электродвигателя последовательного возбуждения
Скоростная характеристика представляет зависимость n=f(Ia) при U=Uн. Она не может быть точно выражена аналитически во всем диапазоне изменения нагрузки от холостого хода до номинальной из-за отсутствия прямой пропорциональной зависимости между Ia и Ф. Приняв допущение Ф=кIa, запишем аналитическую зависимость скоростной характеристики в виде
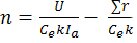
При увеличении тока нагрузки гиперболический характер скоростной характеристики нарушается и приближается к линейному, так как при насыщении магнитной цепи машины с увеличением тока Ia магнитный поток остается практически постоянным (рис. 2). Крутизна характеристики зависит от величины ?r.
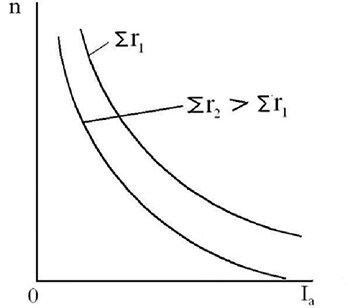
Рис. 2 — Скоростные характеристики двигателя последовательного возбуждения
Таким образом, скорость сериесного двигателя резко изменяется с изменением нагрузки и такая характеристика называется «мягкой».
При малых нагрузках (до 0,25 Iн) скорость двигателя последовательного возбуждения может возрасти до опасных пределов (двигатель идет «вразнос»), поэтому работа таких двигателей на холостом ходу не допускается.
Моментная характеристика — это зависимость M=f(Ia) при U=Uн. Если предположить, что магнитная цепь не насыщена, то Ф=кIa и, следовательно , имеем
Это уравнение квадратичной параболы.
Кривая моментной характеристики изображена на рисунке 3.8. По мере увеличения тока Ia магнитная система двигателя насыщается, и характеристика постепенно приближается к прямой.
Рис. 3 — Моментная характеристика двигателя последовательного возбуждения
Таким образом, электродвигатель последовательного возбуждения развивает момент, пропорциональный Ia 2 , что и определяет главное его преимущество. Так как при пуске Ia=(1,5..2)Iн, то двигатель последовательного возбуждения развивает значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения, поэтому он широко используется в условиях тяжелых пусков и при возможных перегрузках.
Механическая характеристика представляет собой зависимость n=f(M) при U=Uн. Аналитическое выражение этой характеристики может быть получено только в частном случае, когда магнитная цепь машины ненасыщенна и поток Ф пропорционален току якоря Ia. Тогда можно записать
Решая совместно уравнения , получаем
т.е. механическая характеристика двигателя последовательного возбуждения, также как и скоростная, имеет гиперболический характер (рис. 4).
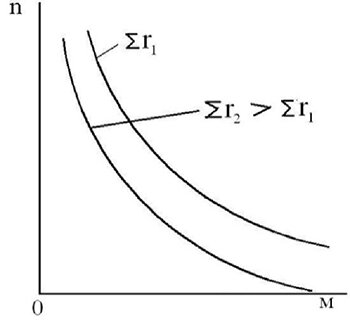
Рис. 4 — Механические характеристики двигателя последовательного возбуждения
Характеристика КПД двигателя последовательного возбуждения имеет обычный для электродвигателей вид (рис. 2 ).
Двигатели постоянного тока последовательного возбуждения имеют следующие особенности
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=I в =I я , что является его главной отличительной особенностью от остальных типов двигателей .

Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в «разнос» . Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
 |
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу , постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).

Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| — питающее напряжение; |
| — магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
ДПТ последовательного возбуждения

В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = kф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:


Формула частоты вращения примет вид
На рис. 29.9, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.

Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rрг . Кроме того, реостат Rрг , рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).

Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 29.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.

Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения.