Двигатель флоппи дисковода схема
 Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Задача состояла в том, как его запустить. Поиск решения в сети Internet по запуску такого двигателя не дал какого-либо положительного результата. Было множество статей по использованию шаговых двигателей позиционирующих магнитную головку и практически ничего по запуску «блина» — двигателя вращения диска. Единственная обнаруженная статья была на английском языке, но там описывался очень древний и конкретный дисковод. В общем пришлось искать способ запуска самостоятельно.
С чего я начал. К плате управления подходит шлейф из 4-5 цветных проводов в зависимости от типа дисковода. Два из них подают питание 12V (это было не трудно проследить), и как правило имеют цвета черный(общий) и красный(+). Оставшиеся провода, как я предположил, должны управлять пуском двигателя и скорее всего имеют ТТЛ уровни.
На плате я также обнаружил два фотоэлемента: один на краю платы — он определяет, что диск вставлен в приемник; второй фотоэлемент стоит ближе к центру двигателя — он позиционирует начальное положение диска в котором имеется соответсвующее отверстие. Нас интересует первый (удаленный) фотоэлемент, так как при вставленном диске мотор уже начинает вращаться (в подключенном к компьютеру дисководу).
Фотография контроллера с мотором от дисковода фирмы TEAC приведена на рисунке 1.
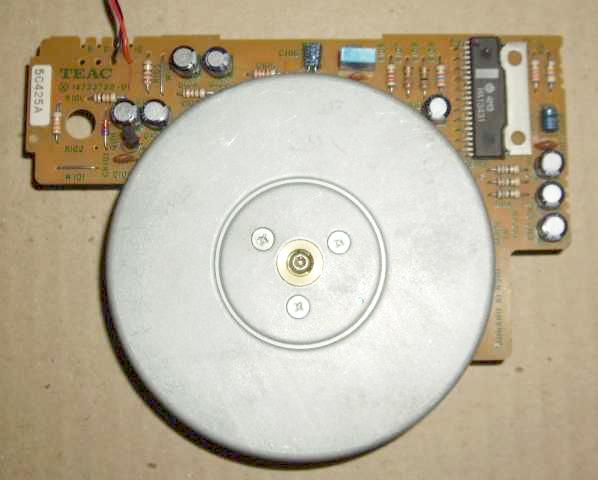
Puc.1
Далее, проследив на плате цепь от фотоэлемента, я установил, что она через транзистор поступает на вход управления микросхемы H13431 — контроллер двигателя (описание этой микросхемы нашел только на японском языке). На тот же транзистор подключен через диод один из проводов входного шлейфа.
Далее — дело техники. Подал на плату питание 12 вольт. Через резистор номиналом 3,3 ком вычисленный контак соединил с плюсом питания. ВСЕ. Двигатель начал вращаться!
Фрагмент платы с установленныи резистором показан на рисунке 2. Крайний левый контакт не задействован (видимо какой-то выходной сигнал). Следы пайки на плате — моя оплошность: подал на входной контакт непосредственно напряжение питания 12В и сжег транзистор, далее действовал осторожнее — через резистор номиналом 3,3 ком.
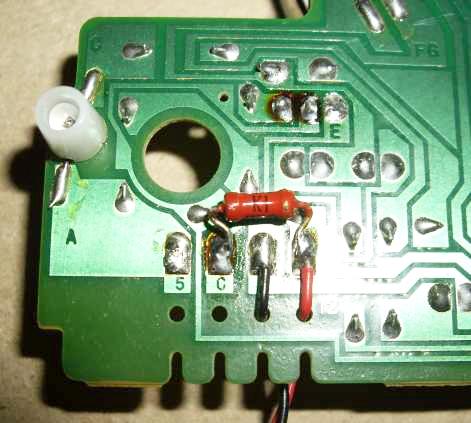
Puc.2
На другом дисководе (рис.3) с названием Sankyo и микросхемой контроллера M51784 пошел таким же путем (описание этой микросхемы есть на сайте www.datasheetcatalog.com). Нашел входной контакт на плате который выходит через резистор на управляющий транзистор и фотоэлемент. Также через резистор подал на него положительный потенциал. И. тишина. Попробовал поочередно позамыкать на «землю» оставшиеся два входных контакта. Заработало. Что это за контакт я не стал выяснять.

Puc.3
Увеличенный фрагмент второй доработанной платы приведен на рисунке 4. «Земляной» контакт и контакт от него слева запаяны вместе. Крайний левый контакт остался свободным.
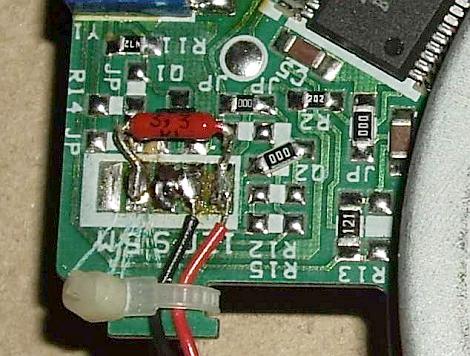
Puc.4
Таким образом порядок подключения неизвестного дисковода достаточно прост:
1. Находим провода питания (обычно красный+ и черный-).
2. Пытаемся найти цепь управляющего транзистора и фотоэлемента (примерная схема на рис.5).
3. Если двигатель не вращается оставшиееся контакты замыкаем на «землю» (или подаем на них положительный потенциал через ограничительный резистор в несколько ком).
Puc.5
Дальнейшие эксперимены с двигателем показали, что он работоспособен в диапазоне питающих напряжений от 7 до 12 вольт. При этом скорость вращения его очень стабильна, так как задается кварцевым или пъезокерамическим резонатором. Кстати можно попытаться поставить резонатор на другую частоту тем самым изменив скорость вращения. На моих платах резонатор выполнен в виде пластмассового прямоугольника синего цвета — его легко найти.
Применение данного двигателя оставляю на вашу фантазию. Желаю удачи!
AVR-STM-C++
суббота, 6 апреля 2019 г.
Шаговый двигатель из CD/DVD привода
Попались в мои руки несколько приводов оптических дисков, которые я разобрал. В итоге помимо плат и прочей механики стал обладателем нескольких шаговых двигателей, которые позиционируют лазерную головку. Захотелось их как-то использовать, но информации по ним фактически никакой. После продолжительного и настойчивого гугления информацию я таки нашел и решил поделится ею с вами.
Итак, шаговый двигатель cd rom

Он имеет маркировку 0550902, чуть ниже 15RF 172KP, хотя можно прочитать и слитно, получится 15RF172KP. Так же маркировка на шлейфе 3 e232171. С обратной стороны выгравировано SM15DD — это тип винта двигателя.

После длительных поисков datasheet я нашел каталог продукции фирмы MOATECH, в котором и упоминается данный двигатель из сд привода. Это двигатель SPS-15RF-172KP, в каталоге есть небольшое упоминание SPS-15RF Type, где присутствует позиция 172FH.
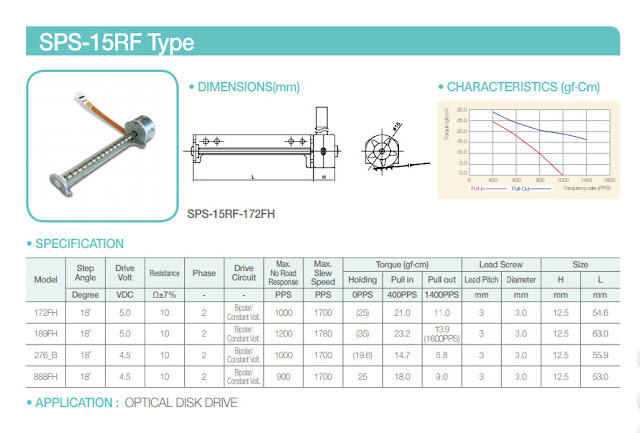
Пусть последние буквы маркировки и не совпадают, но думаю, что это одно и то же. Давайте теперь посмотрим, что же это за шаговик такой.
Характеристики шагового двигателя
В табличке есть данные по сопротивлению обмоток, 10 Ом на обмотку, я проверил — мультиметр показал 10 Ом. Так же можно увидеть угол поворота — 18 градусов на шаг. И, самое важное, напряжение питания двигателя — 5 вольт. Идеально для использования с AVR микроконтроллерами или Arduino.
Этот двигатель dvd привода имеет две фазы, видим, что он биполярный (это должно быть и так ясно, исходя из количества выводов). Для таких двигателей необходимы специальные драйвера управления, в следующей статье будем собирать свой драйвер на полевых транзисторах. Это обусловлено их принципом работы. Давайте посмотрим, как управлять биполярным шаговым двигателем.
Распиновка шагового двигателя
Тут все предельно просто, имеем четыре вывода и две обмотки — по два вывода на обмотку.

Я промаркировал выводы обмоток приписав плюс и минус дабы не путаться где первая обмотка, а где вторая, хотя было бы более правильно написать первый вывод и второй.
Управление биполярным шаговым двигателем
Вот и добрались до вопроса как управлять шаговым двигателем. Это довольно сложный процесс в плане реализации, так как из-за наличия двух фаз нужно подавать напряжение на обмотку в разные стороны. Тоесть в какой-то момент мы подаем плюс на первый вывод первой обмотки, на второй вывод этой же обмотки минус, а в какой-то момент нужно подать наоборот — плюс на второй вывод первой обмотки и минус на первый вывод первой обмотки. Для того, чтоб двигатель вращался, ток на обмотки нужно подавать вот в такой последовательности

Я привел схему подачи тока на биполярный шаговый двигатель в виде четырех полных шагов двигателя. Чтоб двигатель вращался, достаточно после четвертого шага выполнить первый шаг и продолжить дальше. Чтоб двигатель вращался в обратную сторону, то шаги нужно выполнять с обратной последовательности, например 4-3-2-1-4-3. и так далее.
Эта схема управления не такая уж сложная, но в плане подачи тока могут возникнуть затруднения. Но об этом мы поговорим в следующей статье, а сейчас давайте вернемся к нашим двигателям. Я описал только один, а у меня их два.
Второй двигатель выглядит точно так же, как и первый, но имеет другую маркировку — 172F p10816H1. Тем не менее это тот же самый SPS-15RF, который с этой же буквой F после 172 есть в первой позиции таблички из каталога. Так что идентификация обоих двигателей успешно произведена, технические характеристики определены и можно приступать к повторному использованию этих шаговиков.
KKBlog.ru
Свежие записи
Свежие комментарии
- Олег: Мегафон М150-2 разблокировал по эт�…
Внимание!
Комментарии публикую с постмодерацией. Извините, иногда бывают задержки.
Поиск
Флопотрон. Дисководы гибких дисков на 3,5 дюйма
Появилось желание собрать собственный Флопотрон – оркестр из старых флоппи дисководов. Энтузиастами ведется проект Moppy, в рамках которого создана программа и инструкция по дирижированию дисководами посредством Arduino и ПК. Но хочется не просто воспользоваться готовым рецептом, а детально разобраться что и как работает.

Это первая часть цикла про Флопотрон, тут расскажу, как подключить и заставить работать флоппи-дисковод, какие сигналы нужны для управления им. Контроллер Arduino можно на время отложить в сторону, сегодня он не понадобится.
ДЛЯ ПРОДОЛЖЕНИЯ ПРОЕКТА ФЛОПОТРОН НУЖНЫ:
Дисководов 5,25 дюйма + пара дискет
Дисковод 3,5 дюйма марки CHINON FB-354
Немножко дискет 3,5
ПРИМУ В ДАР ИЛИ КУПЛЮ НЕДОРОГО ИЛИ ОПЛАЧУ ПЕРЕСЫЛКУ
ПИШИТЕ НА ПОЧТУ KOBEJIKOV(a)RAMBLER
Что жужжит и крутится?
В дисководе есть мотор, который вращает дискету, и шаговый двигатель, который перемещает считывающую головку. На дискете 80 дорожек, соответственно головка способна сделать 80 шагов.

Нулевая дорожка ближе к краю магнитного диска, восьмидесятая – ближе к его центру.

В музыкальных целях используется перемещение головки, но при желании двигателем тоже можно покрутить.
Питание дисковода FDD
Дисковод требует напряжения в 5 В. Запитать флоппик можно от компьютерного блока питания. Чтобы запустить блок питания, нужно на самом длинном разъеме перемкнуть контакт зеленого и любого из черных проводов.

Если вы впервые так «заводите» блок питания, то настоятельно рекомендую прочитать в интернете инструкцию на эту тему.
Ни в коем случае, не включайте блок питания компьютера без нагрузки!

Питание к дисководу подводится через четырехконтактный разъём (Mate-N-Lock). Чёрные провода – это минус, красный – +5 В, жёлтый – +12В. Напряжение в двенадцать вольт в дисководе не используется, поэтому соответствующий контакт впаян в плату, но ни к чему не подключён.

Для проведения экспериментов, мне оказалось комфортнее запитать дисковод от внешнего блока питания для жёсткого диска. Воспользовался переходником с Molex на Floppy. Такие переходники еще потребуются, поэтому рекомендую их подкупить заблаговременно.

На фотографии видно, что для питания действительно достаточно только двух проводов: +5 В (красный) и минус (чёрный).
Распиновка интерфейса IDE FDD
Разъём интерфейса 34-пиновый, но на практике не все контакты нижнего ряда могут быть установлены.

Нижний ряд может быть и почти совсем «беззубым» (зависит от конкретной модели), нам не принципиально.

В общем случае, нижний ряд (нечетные контакты) – это минус (Ground), верхний ряд (чётные контакты) – сигнальные линии.
В разных документах описывается как минимум два варианта распайки разъема IDE FDD.
| Контакт | Сигнал | Контакт | Сигнал |
| 2 | М/С | 20 | Step Pulse |
| 4 | N/C | 22 | Write Data |
| 6 | N/C | 24 | Write Enable |
| 8 | Index | 26 | Track 0 |
| 10 | Motor Enable А | 28 | Write Protect |
| 12 | Drive Select В | 30 | Read Data |
| 14 | Drive Select A | 32 | Select Head 1 |
| 16 | Motor Enable В | 34 | (Spare) |
| 18 | Stepper Direction |
| Контакт | Сигнал | Контакт | Сигнал |
| 2 | Reduced Write | 20 | Step |
| 4 | Reserved | 22 | Write Data |
| 6 | Drive Select 3 | 24 | Write Gate |
| 8 | Index | 26 | Track 0 |
| 10 | Drive Select 0 | 28 | Write Protect |
| 12 | Drive Select 1 | 30 | Read Data |
| 14 | Drive Select 2 | 32 | Side 1 Select |
| 16 | Motor On | 33 | Diskette Change |
| 18 | Direction Select |
Не указанные в таблицах контакты – это минус (Ground)
или же контакт отсутствует или не подключён.
Контакты нижнего ряда замкнуты на минус (общий провод). Исключения могут составить не подключённый 1 и сигнальный 33 контакты. 34 контакт верхнего ряда также может быть минусовым. Корпус дисковода также, как правило, замкнут на минус. Всё это зависит от конкретной модели флоппика. Всегда можно воспользоваться тестером и определить минусовые контакты конкретного экземпляра.
Поскольку флопотрон не будет задействовать функционал по записи и считыванию данных, то необходимости разбираться в назначении абсолютно всех контактов интерфейса смысла нет.
Нам интересны только несколько контактов:
| Контакт | Сигнал | Значение |
| 12 (6, 10, 14) | Drive Select | Активизация привода |
| 18 | Direction Select | Смена направления движения головки |
| 20 | Step | Импульсы смещения головки |
| 16 (10) | Motor Enable | Включение двигателя вращения диска * |
* Двигатель вращения диска громких звуков не производит,
поэтому в флопотроне он задействован не будет.

Нумерация дисководов
На один кабель в компьютере можно было повесить два или даже четыре дисковода. Дисководы принято обозначать буквами A, B или как Drive 0, Drive 1, Drive 2, Drive 3.
Дисковод реагирует на команды перемещения головки только тогда, когда он выбран активным. Активность указывается подачей логической единицы на соответствующий пин:
- 6 – для Drive 3
- 10 – для Drive 0
- 12 – дляDrive1 илиB
- 14 – для Drive 2 или A
Специальной перемычкой (при наличии) на дисководе можно задать номер контакта (6, 10, 12 или 14), который будет отвечает за активизацию дисковода, т.е., по сути, присвоить номер (тип) устройству (Drive 0, Drive 1 — B, Drive 2 — A, Drive 3).

Со временем для подключения дисководов придумали кабель с перекрученными у одного из разъёмов проводами (Floppy Disk Drive Cable Twist), а дисководы с перемычками перестали производить.

Все дисководы стали выпускаться с предустановленным производителем типом. Самый распространённый – это Drive 1, он же B.
Один из двух подключенных к Twist-кабелю дисководов сохранял свой тип Drive 1 (B), а второй, за счет перекрутки, воспринимался компьютером как Drive 2 (A).

Мне с трудом удалось отыскать хоть какой-то дисковод с перемычкой. На Sony MPF520 перемычка позволяет назначить дисковод как Drive 1 (B) или Drive 0.

Скорее всего, все найденные вами дисководы будут дисководами типа B (Drive 1), поэтому в дальнейшем повествовании опираться буду только на них.
Особенность интерфейса IDE FDD
Сигнальные входы подтянуты к питанию. Напряжение высокого уровня на них означает логический ноль, а низкого – логическую единицу.
Таким образом, чтобы подать логическую единицу на какой-либо контакт, достаточно соединить его с минусом.
Напомню, что нижний ряд контактов и корпус – это минус.
Выбор активного дисковода и свечение светодиода
Активизация дисковода производится соединением 12 контакта на минус (подача логической единицы). У активного дисковода сразу начинает светиться зелёный светодиод.
Перемещение считывающей головки возможно только если дисковод активизирован.
Проще всего активизировать дисковод с помощью жесткой перемычки между 11 (минус) и 12 (активизация) контактом.

Если 11 контакта (минуса) нет, то 12 контакт придется соединить с любым другим минусовым контактом нижнего ряда гибким проводом.

Ещё один вариант, это разобрать дисковод и сделать перемычку на минус прямо на плате.
Если все флоппики активизировать перемычками на минус заранее, то при построении флопотрона не потребуется к каждому дисководу подводить провод к 12 контакту.
Отрицательная сторона такого решения – светодиоды всех дисководов будут светиться всё время, даже когда они «не играют».
Включение двигателя
Чтобы запустить двигатель вращающий диск, надо соединить 16 контакт с минусом.

Однако, двигатель работает только тогда, когда в дисковод вставлена дискета.

Можно дискету не вставлять, а зажать отверткой кнопку-датчик.
Как вариант, установить на плату дисковода перемычку, шунтирующую кнопку.
Все проверенные мной дисководы запускают двигатель даже тогда, когда находятся в не активизированном состоянии, т.е. попросту не обращают внимание на уровень 12-го контакта.
Перемещение считывающей головки
Чтобы сместить головку на один шаг, необходимо подать одиночный импульс на контакт 20. Перемещение производится не по фронту, а по спаду импульса. Дисковод должен быть активизирован (минус на 12 контакт).
Направлением перемещения управляет 18 контакт. Когда он замкнут на минус, то головка перемещается по направлению к центру, в противном случае (по умолчанию), к краю диска.

Поперемещать считывающую головку дисковода просто. Достаточно «пощелкать» минусом по 12 контакту.
Головка способна переместиться на 80 шагов.
Некоторые соображения
Как я уже говорил, можно сделать перемычку на плате дисковода между минусом и 12 контактом. В этом случае свечение светодиода будет постоянным.
Можно подвести к 12 контакту отдельный провод и активизировать дисковод только когда надо «пошуметь» головкой.

Еще один способ, это сделать перемычку на плате между 12 и 20 контактами. Тогда при подаче импульса на смещение головки на 20 контакт, автоматически будет происходить активизация дисковода и светодиод будет подмигивать на каждом шаге перемещения.