Arduino UNO урок 13 — драйвер двигателя L298N
Микросхема L298N представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. Данная микросхема находит очень широкое применение в роботостроительстве. Одна микросхема L298N способна управлять двумя двигателями и обеспечивает максимальную нагрузку до 2А на каждый двигатель, а если задействовать параллельное включение для одного двигателя, то можно поднять максимальный ток до 4А.
В данной статье я хочу рассмотреть подключение к Arduino готового модуля L298N, которые очень широко представлены на популярном аукционе ebay, AliExpress и в др. местах. Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т.д.
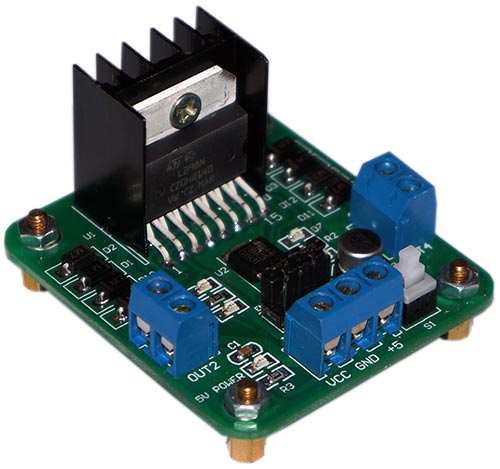
Сами модули на микросхемах L298N выглядят так:
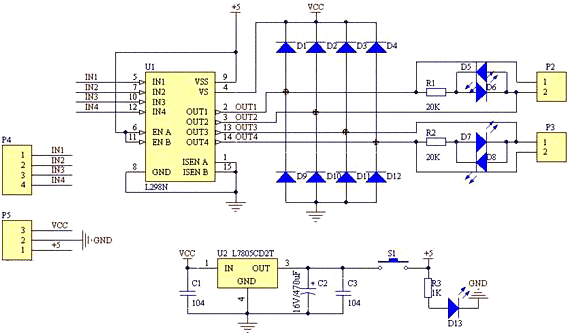
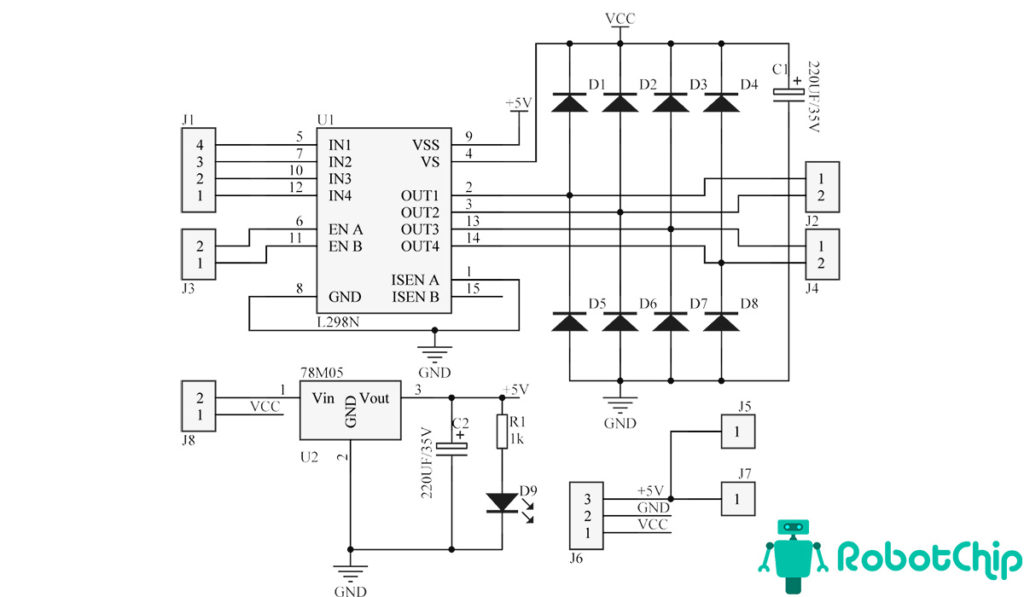
Принципиальная схема такого модуля выглядит следующим образом:
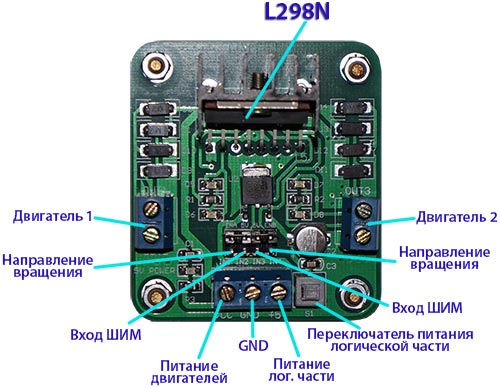
Шилд имеет следующие пины подключения:
Vcc — подключение внешнего питания двигателей
+5 — питание логики
GND — общий
IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями
OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя
OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя
Выключатель S1 служит для переключения питания логической части микросхемы. Т.е. при включенном S1 питание логической части берется от внутреннего преобразователя модуля. При выключенном S1 питание берется от внешнего источника.
На модулях также присутствуют перемычки ENA и ENB для разрешения включения двигателей. Если необходимо, их можно также подключить к Arduino и задействовать, но это лишние 2 провода и в этих входах нет особого смысла.
ШИМ управление позволяет плавно изменять скорость вращение двигателя. Если нам не нужно ШИМ управление, то на соответствующий вход нужно просто подать логическую 1. На какой именно вход IN1 или IN2 вы подадите сигнал ШИМ, либо направление вращения — разницы не имеет. Тоже самое справедливо и для входов IN3, IN4.
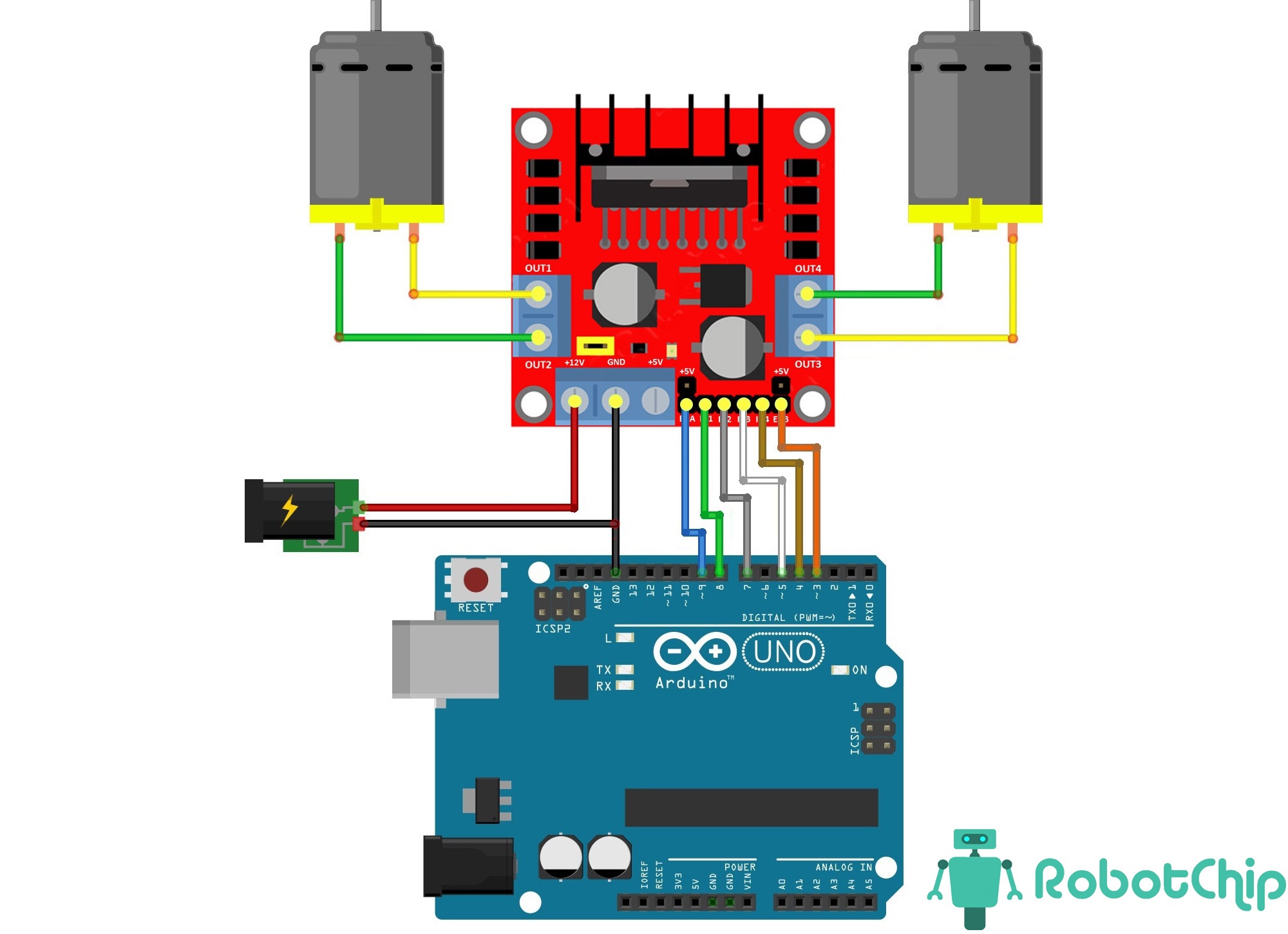
Схема подключения шилда L298N к контроллеру Arduino:
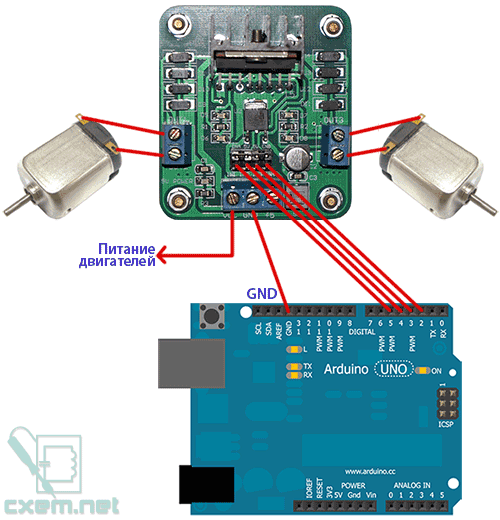
Для питания логической части схемы необходимо нажать кнопку или вставить перемычку (зависит от типа модуля). Если же на вашем модуле не предусмотрен преобразователь 5В, то дополнительно, необходимо соединить вывод 5V от Arduino к входу +5 шилда.
Как видно из схемы выше, 2 и 4 вывод используются для установки направления движения, а 3 и 5 для ШИМ управления выводами.
Напишем тестовую программу, в которой мы будем в цикле изменять скорость вращения, а также направление вращения двигателей:
Ардуино: драйвер L298N для мотора постоянного тока
Чтобы управлять вращением мотора, любому контроллеру необходимо специальное устройство, которое часто называют драйвером (от англ. driver — водитель). В уроке «управление двигателем постоянного тока» мы уже пробовали запускать и вращать в разные стороны мотор двумя способами: с помощью одного транзистора и с помощью микросхемы драйвера L293D.
На этот раз, попробуем использовать более мощный двухканальный драйвер L298N, который часто можно встретить в виде модуля красного цвета (хотя встречаются зеленые и синие модели).

Как и в случае L293N, драйвер представляет собой полный H-мост, главная функция которого — менять полярность на нагрузке. А если в качестве нагрузки будет мотор постоянного тока, то смена полярности приведет к смене направления его вращения. Это то, что нам нужно.
Спецификация модуля L298N:
- напряжение питания двигателей: до 35 В;
- рабочий ток (на каждый канал): 2 А;
- периодический ток (80% — вкл, 20% — выкл): 2,5 А;
- кратковременный ток: 3 А;
- вес: 33 г.
Драйвер L298N работает с более высоким током, чем L293D. С помощью L298N мы можем управлять и слабыми моторчиками типа n20 и мощными моторами, такими как JGA25 или даже JGA37 с крутящим моментом до 20-25 кг/см. Хватит для большинства DIY проектов!
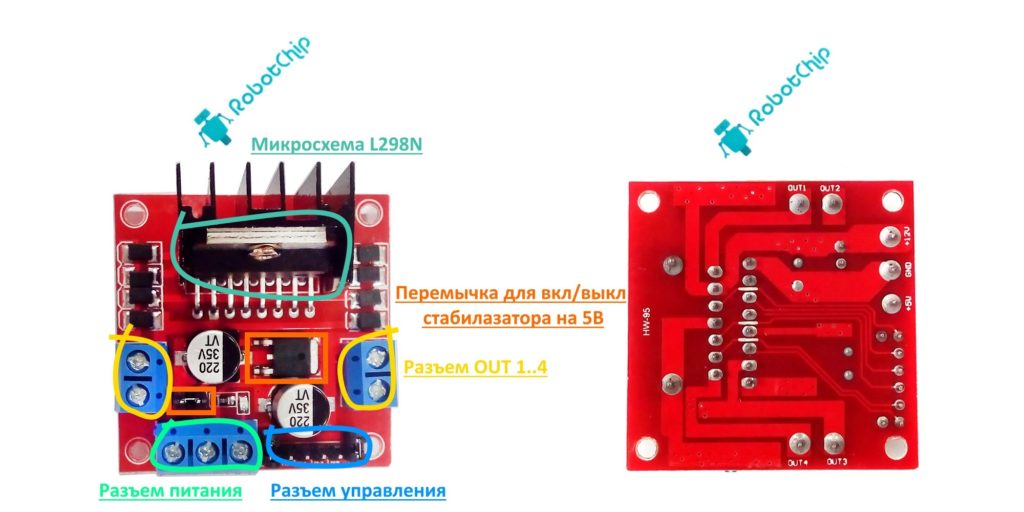
Назначение элементов и контактов на плате драйвера L298N
Посмотрим внимательнее на модуль и разберемся с его контактами.

Логика микросхемы L298N питается напряжением 5 Вольт. Для этого на модуле предусмотрен стабилизатор напряжения 78M05. На вход этого стабилизатора можно подавать напряжение до 35 В, а на выходе всегда получается 5 В. Рабочий ток у 78M05 небольшой — до 500 мА. Однако, при желании, от него можно питать и саму плату Ардуино Уно, к которой мы будем подключать драйвер.
Тройная клемма снизу отвечает за питание модуля. Самый левый контакт — питание моторов. Сюда можно подавать до 35 В. Средний контакт — земля, которая должна быть общей для модуля и контроллера. Правый контакт имеет двоякую функцию. Если на модуле стоит перемычка питания стабилизатора, то на этом контакте будет +5В и к нему можно ничего не подключать, либо питать от него контроллер. Но если перемычку убрать, то к этому контакту нужно будет непременно подключить +5В от контроллера, чтобы питать драйвер. В нашем примере мы будем ориентироваться именно на вариант без перемычки.
Две другие винтовые клеммы (OUT1/2 и OUT 3/4) служат для подключения моторов. Надо отметить, что моторы постоянного тока неполярные, но от того на какой контакт мотора подается плюс, а на какой минус, зависит направление их вращения.
Наконец, осталось разобраться с контактами управления. Их по три штуки на каждый мотор. Контакты ENA и ENB позволяют управлять моторами с помощью ШИМ сигнала. Если ENA и ENB подключить строго к +5 В, то моторы будут всегда вращаться с максимальной возможной скоростью. Именно для этого режима на модуле предусмотрены две перемычки рядом с ENA и ENB.
С помощью контактов IN1,IN2,IN3,IN4 задаётся режим работы моторов. Таблица режимов для двигателя A имеет вид:
| Режим | IN1 | IN2 |
| Вращение в одну сторону | 1 | |
| Вращение в обратную сторону | 1 | |
| Блокировка мотора | 1 | 1 |
| Отключение мотора |
Тут следует пояснить последние два режима. Если нам необходимо резко остановить мотор, то выбираем режим блокировки. Для плавной остановки — выбираем «отключение мотора»
Подключение драйвера L298N к Ардуино Уно
Чтобы попробовать драйвер в деле, подключим его к контроллеру Ардуино Уно и к любому, попавшему под руку, небольшому мотору постоянного тока. В данном уроке мы используем самый простой мотор с напряжением питания 1,5-3 Вольта. Для питания этого мотора нам будет достаточно двух пальчиковых батареек. В такой схеме просто невозможно запитать микросхему драйвера от встроенного стабилизатора, поэтому питание +5В будем брать от Ардуино.
Также отметим, что при данной схеме подключения с внешним питанием +5 В, нам нужно убрать соответствующую перемычку, о которой мы говорили выше (перемычка питания от стабилизатора)!
Ну и раз уж мы планируем управлять скоростью вращения, уберем перемычку с контакта ENA.
Принципиальная схема

Внешний вид макета

Программа для драйвера мотора L298N
Напишем простую программу, которая будет вращать мотор в одну сторону 3 секунды с максимальной скоростью, и затем 3 секунды в обратную сторону с более медленной скоростью.
Загружаем программу на Ардуино, затем подключаем к драйверу элементы питания и смотрим как ведёт себя моторчик.
Следует отметить, что данная программа не гарантирует вращение мотора с какой-то конкретной скоростью. Мы лишь можем менять мощность, передаваемую на мотор, с помощью изменения коэффициента заполнения ШИМ сигнала (duty cycle). Подробнее о ШИМ сигнале можно узнать в одном из наших уроков.
Заключение
Итак, модуль драйвера L298N оказался не таким сложным, как могло показаться. Все драйверы имеют практически схожие контакты управления: EN,IN1,IN2. Бывает, что отдельный вход EN отсутствует, и тогда ШИМ сигнал подается на IN1,IN2. Разобравшись с одним драйвером, мы можем с легкостью применять в своих проектах и другие модели.
Как уже было написано, L298N является достаточно мощным чтобы потянуть большинство моторов, применяемых в DIY проектах. Это и популярные пластиковые желтые моторы с редуктором и более мощные металлические JGA25 и JGA37.
Отдельно следует отметить и ещё одно распространенное применение L298N. С помощью этого драйвера можно управлять биполярными шаговыми двигателями, хотя и не настолько эффективно, как это делают специализированные драйвера типа A4988.
Драйвер шагового двигателя и двигателя постоянного тока L298N и Arduino
Модуль L298N H-bridge можно использовать для двигателей, напряжение питания которых находится в диапазоне от 5 до 35 вольт.
Кроме того, на многих подобных платах есть встроенный 5В регулятор, который дает возможность запитывать ваши устройства.
Подключение модуля L298N
Прежде чем перейти к управлению двигателем постоянного тока и шаговым двигателем, разберемся с подключением модуля L298N (даташит, техническая информация от производителя).
Ссылки для заказа необходимого оборудования из Китая
- КУПИТЬ цифровой датчик температуры DS18B20;
- КУПИТЬ Arduino Uno R3;

Ниже приведены разъяснения к рисунку.
- Для двигателя постоянного тока 1 “+” или для шагового двигателя A+
- Для двигателя постоянного тока 1 “-” или для шагового двигателя A-
- Коннектор на 12 вольт. Снимите его, если используете напряжение питания больше 12 вольт.
- Питания вашего двигателя обеспечивается с этого выхода. Максимальное напряжение питания постоянным током 35 вольт. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.
- GND — земля.
- Питание 5 вольт, если коннектор на 12 вольт замкнут. Идеально для питания Arduino и т.п.
- Коннектор для двигателя постоянного тока 1. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- IN1.
- IN2.
- IN3.
- IN4.
- Коннектор для двигателя постоянного тока 2. В случае использования шагового двигателя, подключать сюда ничего не надо. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- Двигатель постоянного тока 2 “+” или шаговый двигатель B+.
- Двигатель постоянного тока 2 “-” или шаговый двигатель B-.

L298N, Arduino и двигатель постоянного тока
Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере L298N.
Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
После этого подключите источник питания. Плюс — к четвертому пину на L298N, минус (GND) — к 5 пину. Если ваш источник питания до 12 вольт, коннектор, отмеченный 3 на рисунке выше, можно оставить. При этом будет возможность использовать 5 вольтовый пин 6 с модуля.
Данный пин можно использовать для питания Arduino. При этом не забудьте подключить пин GND с микроконтроллера к 5 пину на L298N для замыкания цепи. Теперь вам понадобится 6 цифровых пинов на Arduino. Причем некоторые пины должны поддерживать ШИМ-модуляцию.
ШИМ-пины обозначены знаком “
” рядом с порядковым номером.
Теперь подключите цифровые пины Arduino к драйверу. В нашем примере два двигателя постоянного тока, так что цифровые пины D9, D8, D7 и D6 будут подключены к пинам IN1, IN2, IN3 и IN4 соответственно. После этого подключите пин D10 к пину 7 на L298N (предварительно убрав коннектор) и D5 к пину 12 (опять таки, убрав коннектор).
Направление вращения ротора двигателя управляется сигналами HIGH или LOW на каждый привод (или канал). Например, для первого мотора, HIGH на IN1 и LOW на IN2 обеспечит вращение в одном направлении, а LOW и HIGH заставит вращаться в противоположную сторону.
При этом двигатели не будут вращаться, пока не будет сигнала HIGH на пине 7 для первого двигателя или на 12 пине для второго. Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. Для управления скоростью вращения используется ШИМ-сигнал.
Скетч приведенный ниже, отрабатывает в соответствии со схемой подключения, которую мы рассматривали выше. Двигатели постоянного тока и Arduino питаются от внешнего источника питания.
// подключите пины контроллера к цифровым пинам Arduino
Обзор драйвера мотора на L298N
Автор: Сергей · Опубликовано 20.12.2018 · Обновлено 13.04.2020

Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры
► Напряжение питания логики модуля: 5 В
► Потребляемый ток встроенной логики: 36 мА
► Напряжение питания драйвера: 5 В – 35 В
► Рабочий ток драйвера: 2 А (пиковый ток 3 А)
► Габариты: 43.5 мм х 43.2мм х 29.4мм
Общие сведения
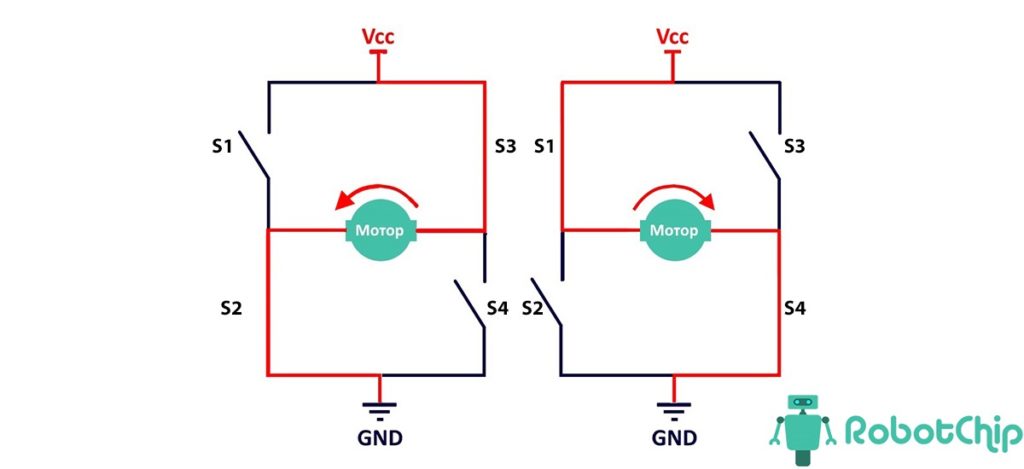
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Для управления скоростью двигателя постоянного тока используется метод PWM (Широтно-импульсной модуляции).
Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
► Вывод Vss — питание двигателей, от 5 до 35 В;
► Вывод GND — общий вывод заземления;
► Вывод Vs — питание для логической схемы;
► Перемычка ENA — используются для управления скоростью двигателя A;
► Вывода IN1 и IN2 — используются для управления направлением вращения двигателя A;
► Вывода IN3 и IN4 — используются для управления направлением вращения двигателя B;
► Перемычка ENB — используются для управления скоростью двигателя B;
► Выходы OUT1 и OUT2 — разъем для двигателя A;
► Выходы OUT3 и OUT4 — разъем для двигателя B;
Принципиальная схема модуля L298N
Питание модуля.
Питание модуля L298N осуществляется через трех контактный разъем, шагом 3,5 мм:
► Vs — источник питания двигателей, 3B — 35B
► GND — земля
► Vss — источник питания модуля, 4,5В — 5,5В
Фактически у модуля L298N, есть два контакта питания, а именно. «Vss» и «Vs». От «Vs» питаются двигатели с допустимым напряжением от 5 В до 35 В, а от «Vss» питается логическая схема модуля 4,5В до 5,5В. На плате установлен встроенный стабилизатор напряжения на 5 Вольт (78M05), его можно включить или отключить с помощью перемычки. Когда перемычка установлена, стабилизатор включен и питает логику модуля (Vss) от источника питания двигателя (Vs). При включенном стабилизаторе, вход «Vss» работает как выход и обеспечивает 5В с током 0,5 А. Когда перемычка убрана, стабилизатор отключен и необходимо отдельно подключить питание 5 Вольт на вход Vss.
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт.

Падение напряжения L298N
Падение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростью
Разъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Подключение L298N к Arduino (коллекторный двигатель)
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.
► Коллекторный двигатель x 2 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Первым делом необходимо подключить источник питания 12B к двигателям, в примере используется распространенные двигатель постоянного тока, рассчитанные на 3B . . . 12B (применяемые в робототехнике). Учитывая внутреннее падение напряжения на микросхеме L298N, двигатели получат 10 В и будут вращаться не в полную силу.
Далее, нужно подключить 5 вольт на логическую схему L298N, для этого воспользуемся встроенным стабилизатором напряжения, который работает от источника питания двигателя, поэтому, перемычка EN должна быть установлена.
Теперь осталось подключить управляющие провода ENA, IN1, IN2, IN3, IN4 и ENB к шести цифровым выводам Arduino 9, 8, 7, 5, 4 и 3. Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
Осталось подключить Arduino к источнику питания и загрузить скетч.