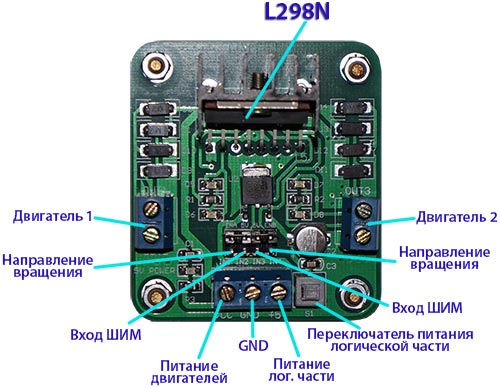
Драйвер RKP-MDL298-01A-V2 двухканальный на L298N
Статья о двухканальном драйвере моторов RKP-MDL298-01A-V2 на микросхеме L298N. Подключение к Ардуино, подключение DC-моторов, примеры программного кода.
Драйвер моторов на базе микросхемы L298N позволяет управлять двумя моторами постоянного тока либо шаговым двигателем с потребляемым током до 2 Ампер.

В отличии от микросхемы L293D, в микросхеме L298N не встроены защитные диоды, их необходимо устанавливать в обвязку микросхемы дополнительно (8 штук по бокам).
По функционалу микросхема L298N полностью идентична микросхеме L293D. Мы видим те же управляющие выводы. Чередование разноименных сигналов (высокий логический уровень или низкий) на парах выводов IN1, IN2 и IN3, IN4 задают направление вращения моторов.
Выводы ENABLE A, B (ENA привязан к IN1, IN2. ENB к IN3, IN4) отвечают за раздельное управление каналами.
Могут использоваться в двух режимах:
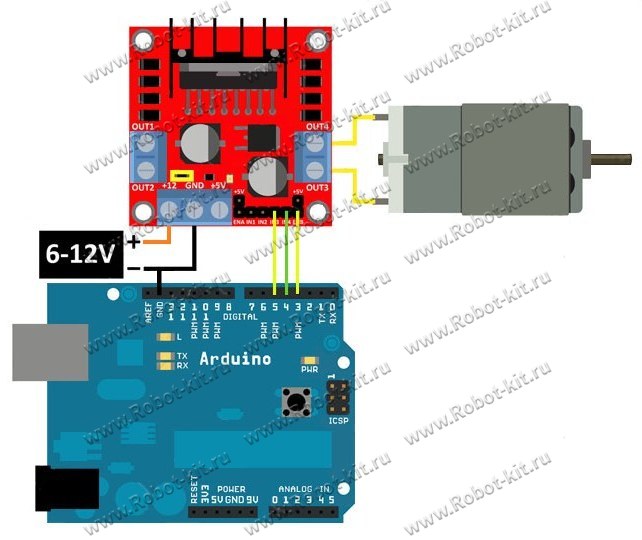
Условно «активном» режиме, когда ими будет управлять контроллер (рис. 1) — высокий логический уровень разрешает вращение моторов, низкий запрещает вне зависимости от состояния выводов «IN». Для регулировки скорости моторов, на «EN» выводы подается ШИМ (PWM) сигнал.
Условно «пассивном» режиме, просто притянув выводы «EN» к высокому уровню (+5V). Для этого на плате, рядом с выводами ENA и ENB находятся штырьки, соединенные с +5V. Замыкаем выводы с помощью джамперов (рис. 2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Для остановки нужно будет подавать одноименные сигналы на выводы «IN».
В программных кодах в продолжении статьи все будет прокомментировано.
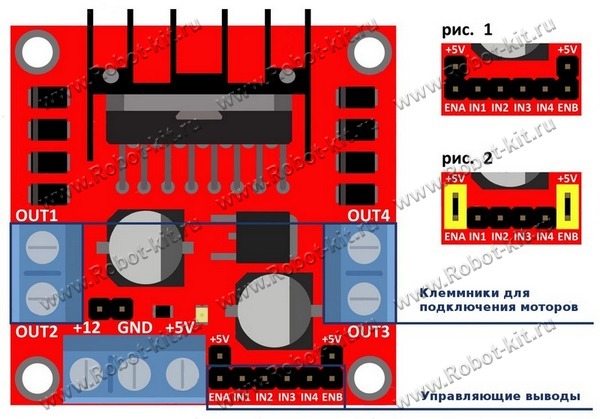
Клеммник подачи питания и работа стабилизатора.
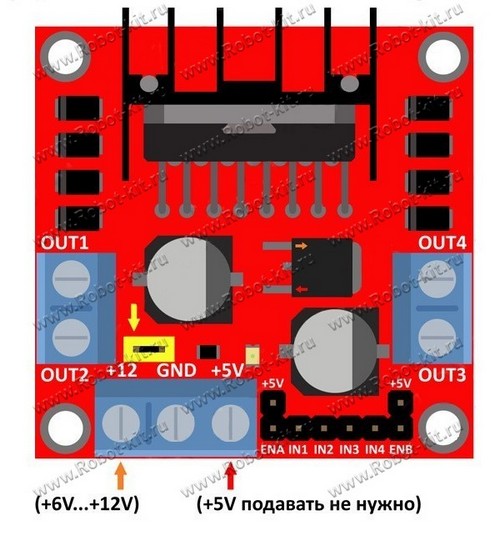
Разъем “+12V” предназначен для подачи питания на моторы и одновременно, при одетом джампере, подает питание на стабилизатор, который выдает +5V для питания логики драйвера.
Выходит, при таком варианте, не нужно тянуть лишний провод на разъем +5V.
Маркировка именно “+12V” связана с тем, что напряжение питания моторов может лежать в диапазоне от 5V до 35V, в то время как максимальное входное напряжение стабилизатора 12V. То есть, при одетом джампере, подача свыше 12V может спалить стабилизатор.
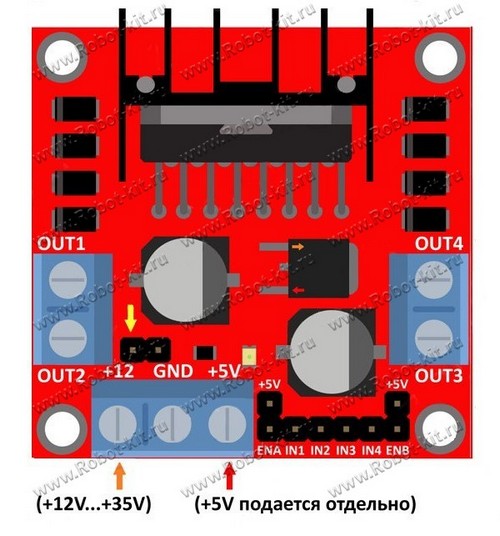
Как мы уже поняли, маркировка “+12V” носит предупредительно-информативный характер.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер.
Теперь напряжение не поступает на стабилизатор и не сможет повредить его, но теперь необходимо подать внешнее +5V.
Подключение моторов к модулю драйвера моторов на L298N
Начнем с подключения одного мотора, с притянутым к +5V выводом ENB.
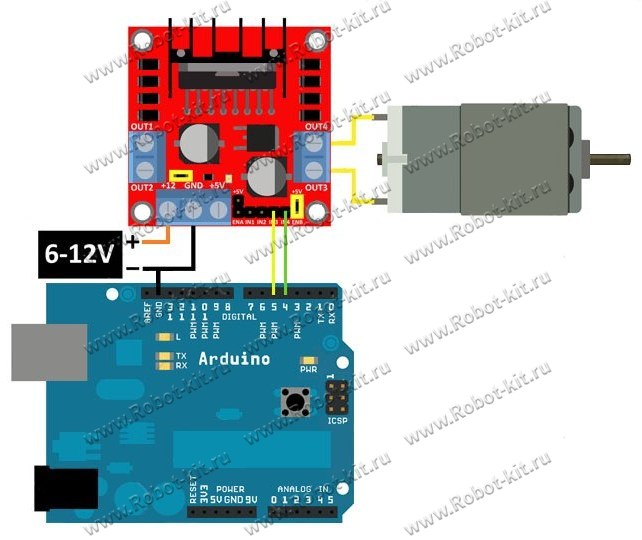
Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.5 секунды, вращаться «влево» 4 секунды, остановка 5 секунд и снова цикл повторяется.
Пример программного кода
В данном примере мы подсоединили ENB к выводу ШИМ (D3), и задействуем возможность драйвера управлять скоростью, меняя скважность посылаемого ШИМ сигнала. Значения скважности задаются функцией analogWrite (pin, число) , где число изменяется от 0 до 255, прямо пропорционально скважности сигнала. Для наглядности, подобраны четыре значения, при которых двигатель стартует с низких оборотов, набирает средние, выходит на максимальные и не вращается.
Пример программного кода
Ну и напоследок подключим два двигателя с регулировкой скорости.
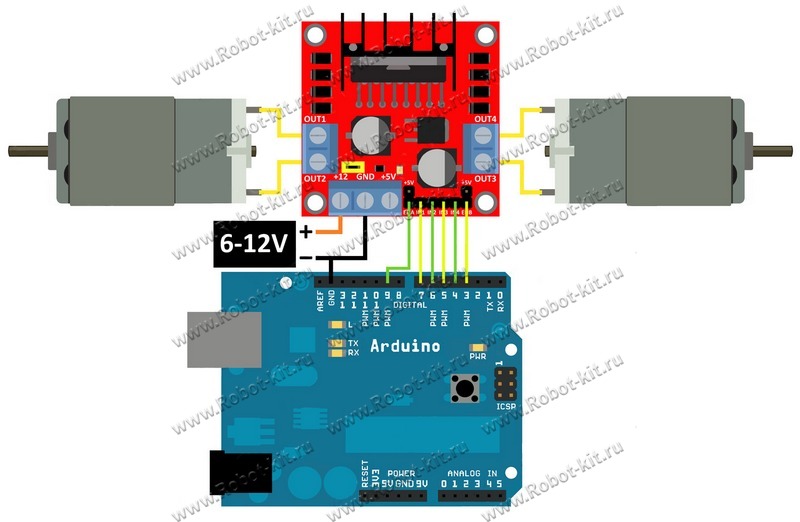
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости.
Arduino UNO урок 13 — драйвер двигателя L298N
Микросхема L298N представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. Данная микросхема находит очень широкое применение в роботостроительстве. Одна микросхема L298N способна управлять двумя двигателями и обеспечивает максимальную нагрузку до 2А на каждый двигатель, а если задействовать параллельное включение для одного двигателя, то можно поднять максимальный ток до 4А.
В данной статье я хочу рассмотреть подключение к Arduino готового модуля L298N, которые очень широко представлены на популярном аукционе ebay, AliExpress и в др. местах. Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т.д.
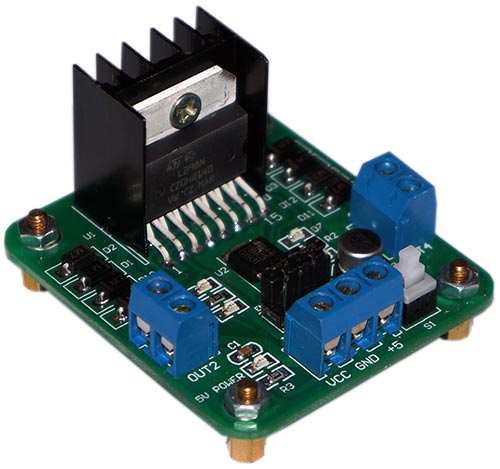
Сами модули на микросхемах L298N выглядят так:
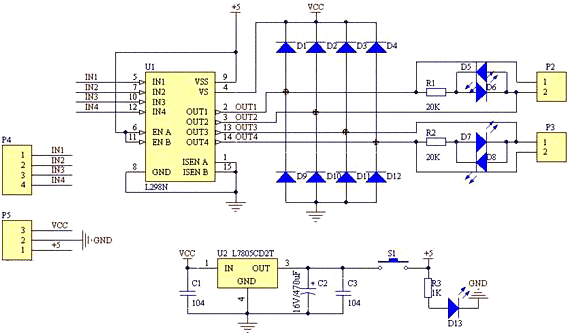
Принципиальная схема такого модуля выглядит следующим образом:
Шилд имеет следующие пины подключения:
Vcc — подключение внешнего питания двигателей
+5 — питание логики
GND — общий
IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями
OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя
OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя
Выключатель S1 служит для переключения питания логической части микросхемы. Т.е. при включенном S1 питание логической части берется от внутреннего преобразователя модуля. При выключенном S1 питание берется от внешнего источника.
На модулях также присутствуют перемычки ENA и ENB для разрешения включения двигателей. Если необходимо, их можно также подключить к Arduino и задействовать, но это лишние 2 провода и в этих входах нет особого смысла.
ШИМ управление позволяет плавно изменять скорость вращение двигателя. Если нам не нужно ШИМ управление, то на соответствующий вход нужно просто подать логическую 1. На какой именно вход IN1 или IN2 вы подадите сигнал ШИМ, либо направление вращения — разницы не имеет. Тоже самое справедливо и для входов IN3, IN4.
Схема подключения шилда L298N к контроллеру Arduino:
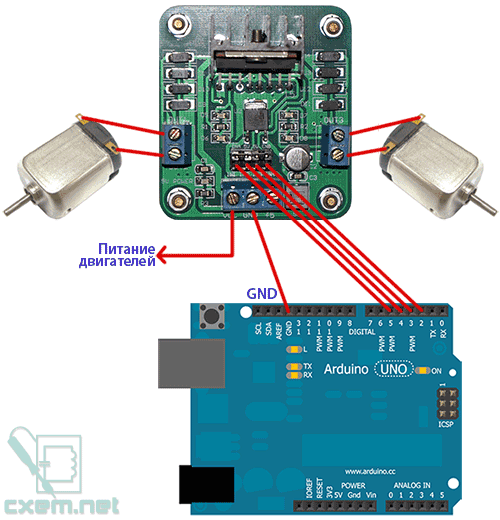
Для питания логической части схемы необходимо нажать кнопку или вставить перемычку (зависит от типа модуля). Если же на вашем модуле не предусмотрен преобразователь 5В, то дополнительно, необходимо соединить вывод 5V от Arduino к входу +5 шилда.
Как видно из схемы выше, 2 и 4 вывод используются для установки направления движения, а 3 и 5 для ШИМ управления выводами.
Напишем тестовую программу, в которой мы будем в цикле изменять скорость вращения, а также направление вращения двигателей:
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
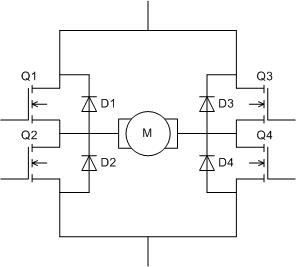 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| Остановка | ||
| 1 | Двигается вперед | |
| 1 | Двигается назад | |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.